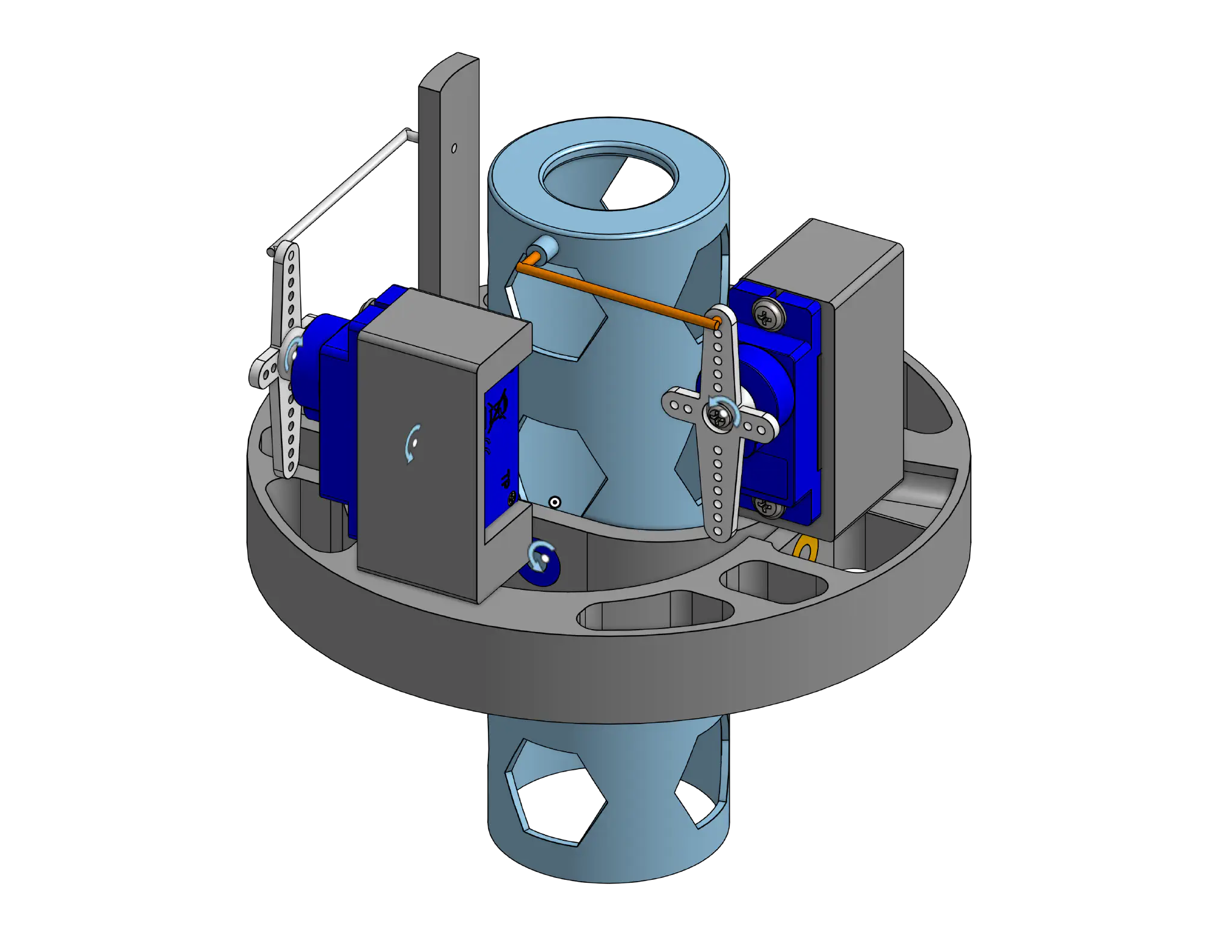
This is an early‑stage design study for an actively stabilized, thrust‑vector‑controlled model rocket. I completed gimbal CAD and motor selection, and ran OpenRocket simulations to drive airframe and nose‑cone geometry.
On the avionics side, I’ve outlined a flight computer and firmware plan, C code on an STM32‑class MCU with a 9‑axis IMU, barometer, pyro channels, and onboard flash for logs.
Next steps are a bench‑top gimbal rig with IMU‑in‑the‑loop control to validate sensors, control loops, and actuation before any flight testing.
On the avionics side, I’ve outlined a flight computer and firmware plan, C code on an STM32‑class MCU with a 9‑axis IMU, barometer, pyro channels, and onboard flash for logs.
Next steps are a bench‑top gimbal rig with IMU‑in‑the‑loop control to validate sensors, control loops, and actuation before any flight testing.